#include <SPI.h>
/*
This software is written by Marios Nicolaou 5B4WN/G0WWW
Use this software at your own risk!
More details about this project http://www.5b4wn.com/main/a2138.html
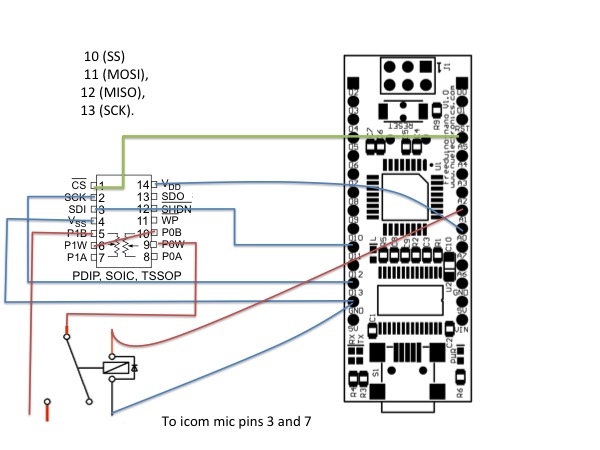
Connections
arduino MOSI 11 to SDI 3
arduino CLK 13 to SCK 2
arduino CS 10 to CS 1
Resistance is 5 and 6 POT1
Resistrance is 10 and 9 POT0
putting them in series increases the range!
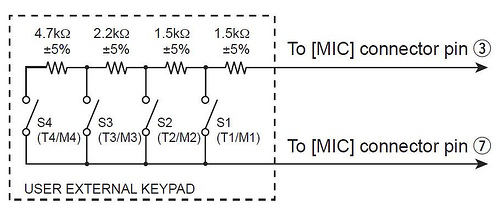
For Icom we need
Message 1 1.5K
Message 2 3K
Message 3 5.2K
Message 4 9.9K
For OTRSP see http://www.k1xm.org/OTRSP/OTRSP_Protocol.pdf
Commands supported
KP1 KP2 KP3 KP4
KA abort
Command terminated by \R
*/
int SSpin=19; //a5
int potPowerPin= 14; //a0
int relayOnPin=15; //a1
int pot0=0x10;
int pot1=0x0;
long timeSincePress;
String serialCommand;
int delayTime=60; //time for the resistance to be applied to the two pins of mic. Min is 50ms
void setup() {
//supported modes by MPC are mode 0 and mode 3
pinMode(SSpin, OUTPUT);
pinMode(potPowerPin, OUTPUT);
pinMode(relayOnPin, OUTPUT);
digitalWrite(relayOnPin, LOW);
digitalWrite(potPowerPin, HIGH); //powerUp Pot
SPI.setDataMode(0);
SPI.begin();
Serial.begin(9600); //OTRSP default 9600
Serial.println("5B4WN Icom voice keyer");
maxPot(); //go to 20K to avoid triggering the memory
timeSincePress=millis(); //initialise time
}
void loop() {
if (Serial.available()>0) {
byte buffer=Serial.read();
serialCommand +=(char) buffer;
if (serialCommand.length()>20) {
serialCommand=""; //avoid too long strings
}
if (buffer==0x0d) { //received a \r
if (serialCommand.startsWith("MP")) {
String memory=serialCommand.substring(2,3); //from 2 to 3!
Serial.println("Memory:"+memory);
if (memory=="1") {
digitalWrite(relayOnPin, HIGH);
writePot(pot0, 1500);
writePot(pot1, 1500);
delay(delayTime);
digitalWrite(relayOnPin, LOW);
maxPot();
timeSincePress=millis();
}
else if (memory=="2") {
digitalWrite(relayOnPin, HIGH);
writePot(pot0, 3000);
writePot(pot1, 3000);
delay(delayTime);
digitalWrite(relayOnPin, LOW);
maxPot();
timeSincePress=millis();
}
else if (memory=="3") {
digitalWrite(relayOnPin, HIGH);
writePot(pot0, 5200);
writePot(pot1, 5200);
delay(delayTime);
digitalWrite(relayOnPin, LOW);
maxPot();
timeSincePress=millis();
}
else if (memory=="4") {
digitalWrite(relayOnPin, HIGH);
writePot(pot0, 9900);
writePot(pot1, 9900);
delay(delayTime);
digitalWrite(relayOnPin, LOW);
maxPot();
timeSincePress=millis();
}
else {
}
serialCommand="";
}
else if (serialCommand.startsWith("MA")) {
//abort
if ((millis()-timeSincePress)<3000) { //if esc is pressed within 3 s (time for most messages) the resend control for message 1
digitalWrite(relayOnPin, HIGH);
writePot(pot0, 1500);
writePot(pot1, 1500);
delay(delayTime);
digitalWrite(relayOnPin, LOW);
maxPot();
timeSincePress=millis();
}
serialCommand="";
}
else if (serialCommand.startsWith("?NAME")) {
Serial.println ("5B4WN voice keyer");
}
else {
//some other command so ignore
serialCommand="";
}
}
} //serial.available
}
void writePot(int address, int valueOhms) {
int n=map(valueOhms, 0, 20000,0, 128);
digitalWrite(SSpin, LOW);
SPI.transfer(address);
SPI.transfer(n);
digitalWrite(SSpin, HIGH);
}
void maxPot() {
writePot(pot0, 20000); //go for 20K
writePot(pot1, 20000);
}
 DXpeditions
DXpeditions